The research activities developed in the field of Mechanics and Machine Design include:
- Mobile robots and climbing robots, with particular reference to mechanical and mechatronic aspects and the development of innovative solutions for locomotion systems.
- Simulation and optimization of multibody mechanical systems, using advanced tools capable of managing complex systems (including rigid and/or highly flexible bodies, contacts, impacts, geometric and material nonlinearities).
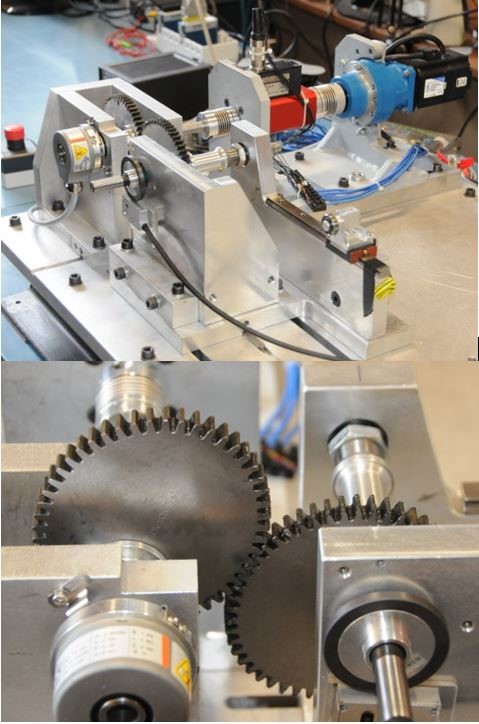
- Simulation and design of mechanical transmissions, including continuously/infinitely variable transmissions and non-circular gears.
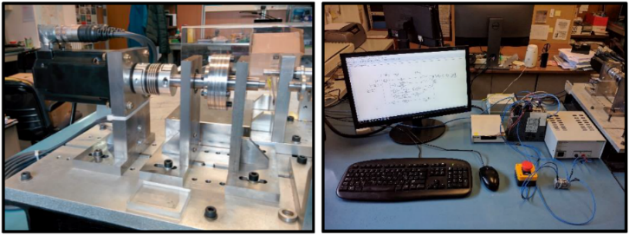
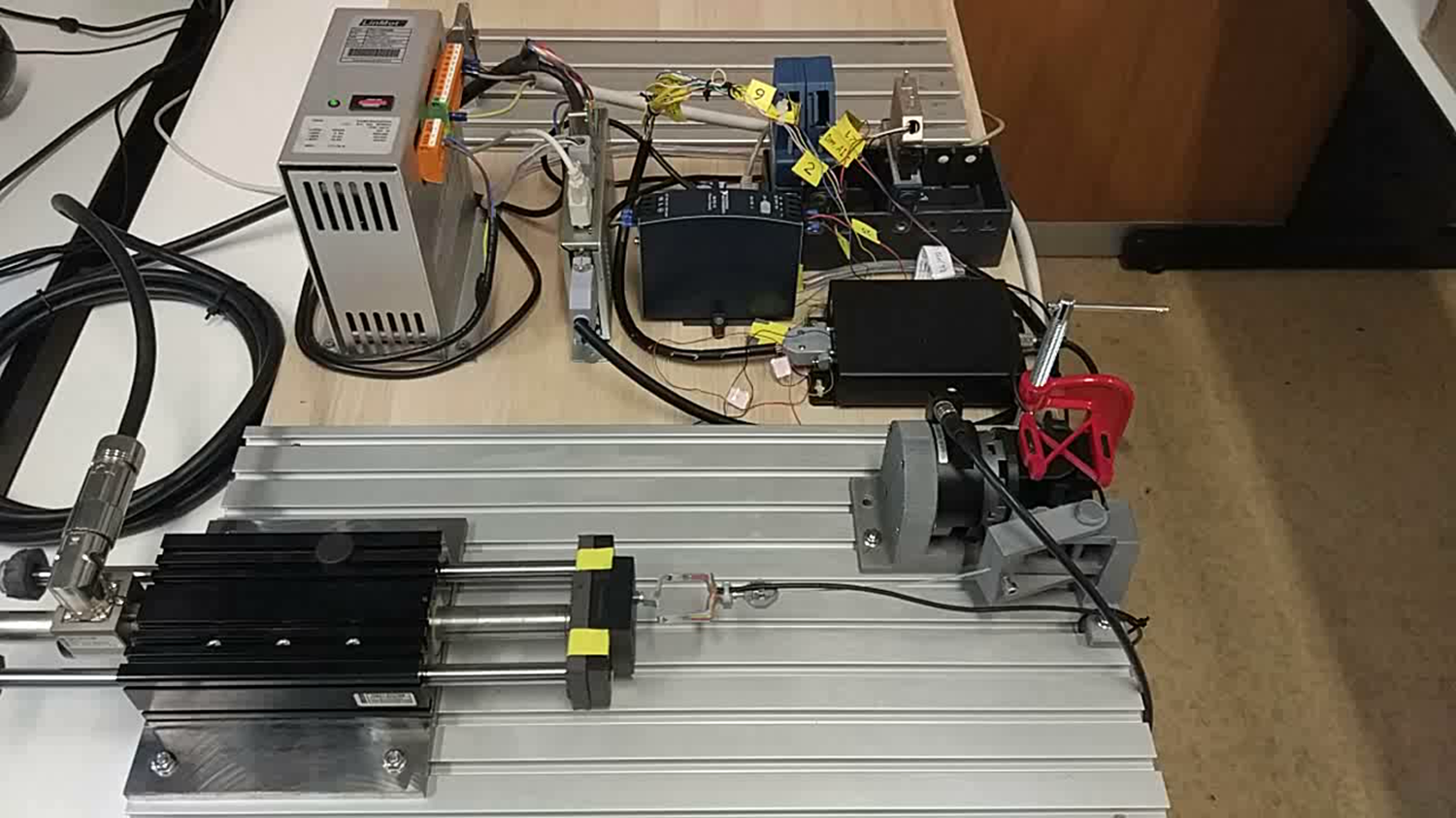
- Dynamics and control of mechanical and mechatronic systems, particularly advanced control strategies (e.g., adaptive, fuzzy, sliding-mode, genetic, backstepping, model-based, fractional calculus, reinforcement learning, neural network, and their possible combinations).
- Conception, design, optimization, and experimental evaluation of compliant mechanisms, i.e., structures (including monolithic ones) designed to withstand large deformations.
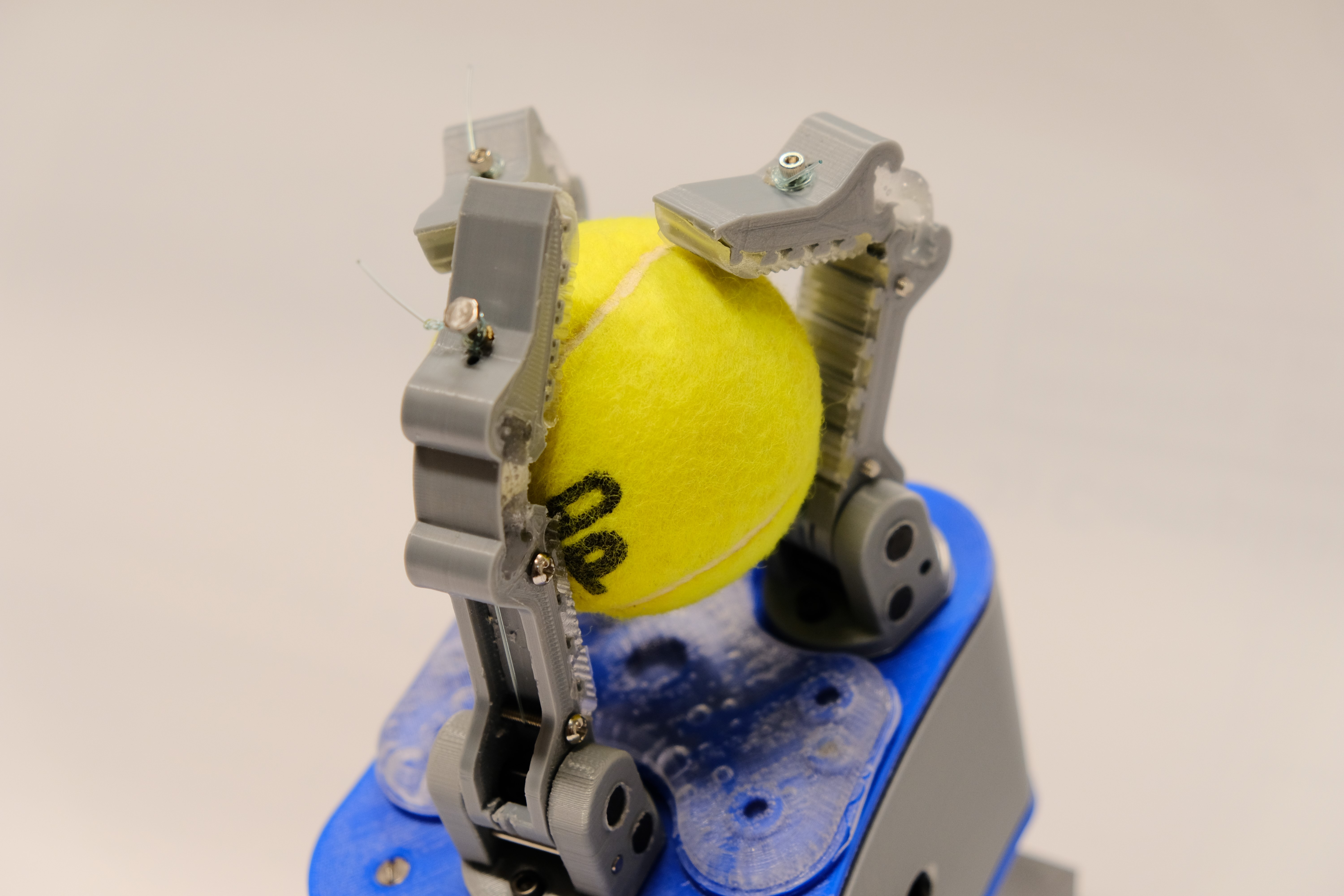
- Design and implementation of gripping systems (grippers or robotic hands) and devices for safe human-robot interaction (actuators with variable stiffness and/or impedance).
- Design and structural analysis of components for additive manufacturing (3D printing). Structural and topological optimization, development of joining solutions for 3D-printed components.
Laboratories
- Mechanical Computer Aided Engineering (MCAELab)
- Mechanical Design for Automation and Robotics (PMARLab)
- Mechanical Characterization Laboratory
- Metallography Laboratory
Publications
- M. Callegari, P. Fanghella, F. Pellicano, “Meccanica Applicata alle Macchine, Utet Universitò, 2017.
- P. Bilancia, G. Berselli, “Design and testing of a monolithic compliant constant force mechanism” (2020) Smart Materials and Structures, vol. 29 (4), 2020 .
- G. Quaglia, M. Nisi, W. Franco, L. Bruzzone, “Dynamic Simulation of an Electric Stair-Climbing Wheelchair”. International Journal of Automation Technology, vol. 11(3), pp. 472-480, 2017.
- R.C. Michelini, R.P. Razzoli, “Product-service eco-design: Knowledge-based infrastructures”, Journal of Cleaner Production, vol. 12(4), pp. 415-428, 2004.
- M. Verotti, P. Masarati, M. Morandini, N.P. Belfiore, “Active isotropic compliance in redundant manipulators”, Multibody System Dynamics, 49 (4), pp. 421-445, 2020