I campi in cui si inseriscono le attività di ricerca sviluppate nell’ambito della Meccanica e Progettazione delle Macchine sono:
- Robot mobili e climbing robot, con riferimento agli aspetti meccanici e meccatronici e allo sviluppo di soluzioni innovative per i sistemi di locomozione.
- Simulazione ed ottimizzazione di sistemi meccanici multibody, mediante utilizzo di tools avanzati in grado di gestire sistemi complessi (comprendenti corpi rigidi e/o altamente flessibili, contatti, urti, non-linearità geometriche e di materiale).
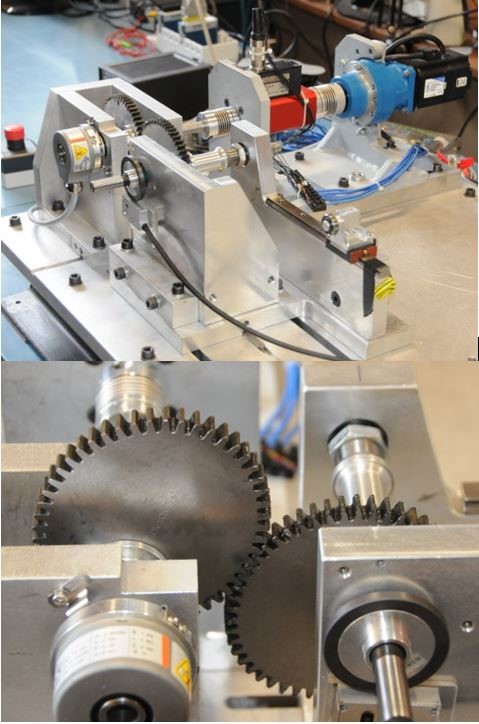
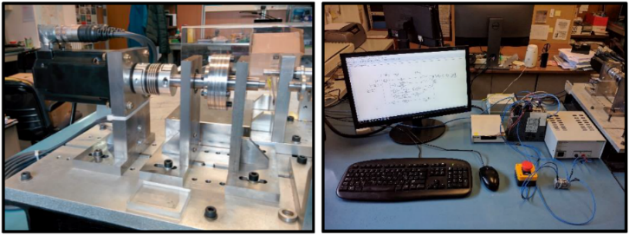
- Simulazione e progettazione di trasmissioni meccaniche, ivi incluse trasmissione continuamente/infinitamente variabili e ruote dentate non circolari.
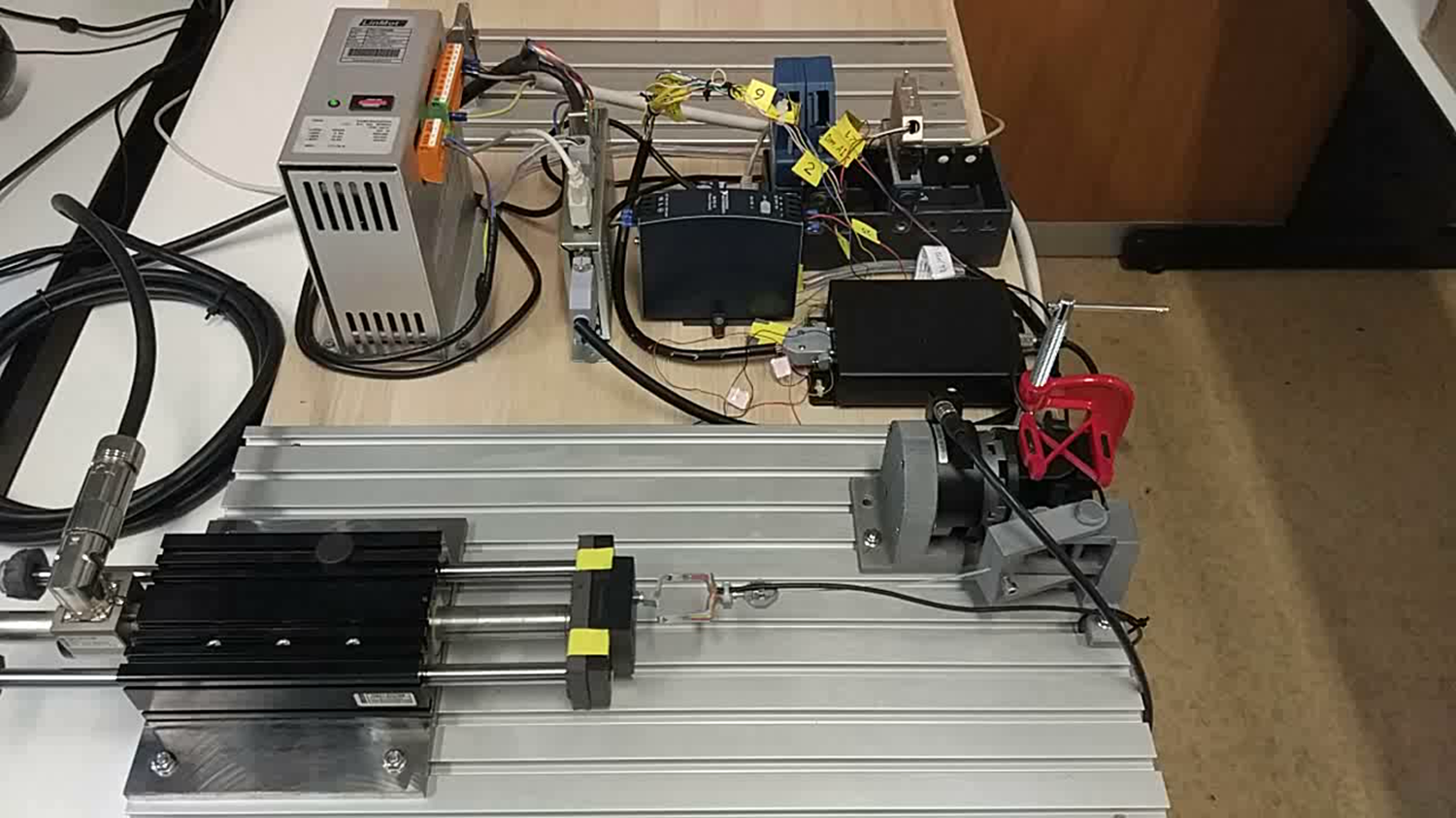
- Dinamica e controllo di sistemi meccanici e meccatronici, in particolare strategie di controllo avanzate (ad esempio algoritmi adattativi, fuzzy, sliding-mode, genetici, backstepping, basati su modello, su calcolo frazionario, su reinforcement learning, su rete neurale, e le loro possibili combinazioni).
- Concezione, progettazione, ottimizzazione e valutazione sperimentale di meccanismi “compliant”, ossia strutture (anche monolitiche) progettate per garantire grandi deformazioni.
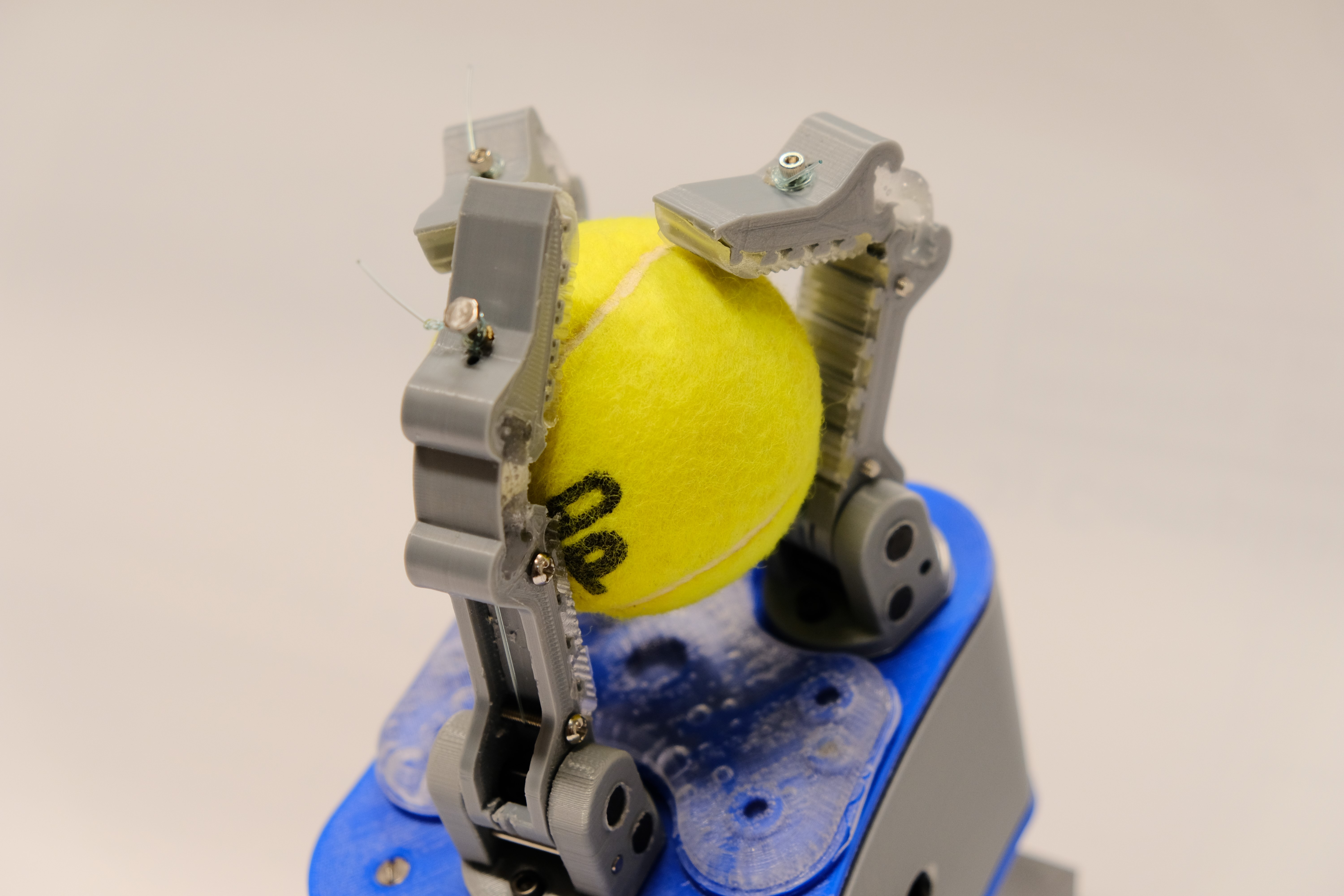
- Progettazione e realizzazione di sistemi di presa (gripper o mani robotiche) e dispositivi per l’iterazione sicura uomo-robot (attuatori a rigidezza e/o impedenza variabile).
- Progettazione e analisi strutturale di componenti per manifattura additiva (stampa 3D). Ottimizzazione strutturale e topologica, sviluppo di soluzioni per giunzione di componenti realizzati in stampa 3D.
Ricercatori
- Massimiliano Avalle
- Giovanni Berselli
- Luca Bruzzone
- Flavia Libonati
- Margherita Monti
- Pietro Fanghella
- Roberto Razzoli
- Alessandro Rebora
- Matteo Verotti
Laboratori
- Mechanical Computer Aided Engineering (MCAELab)
- Progettazione Meccanica per l’Automazione e la Robotica (PMARLab)
- Laboratorio di Caratterizzazione Meccanica
- Laboratorio di Metallografia
Pubblicazioni
- M. Callegari, P. Fanghella, F. Pellicano, “Meccanica Applicata alle Macchine, Utet Universitò, 2017.
- P. Bilancia, G. Berselli, “Design and testing of a monolithic compliant constant force mechanism” (2020) Smart Materials and Structures, vol. 29 (4), 2020 .
- G. Quaglia, M. Nisi, W. Franco, L. Bruzzone, “Dynamic Simulation of an Electric Stair-Climbing Wheelchair”. International Journal of Automation Technology, vol. 11(3), pp. 472-480, 2017.
- R.C. Michelini, R.P. Razzoli, “Product-service eco-design: Knowledge-based infrastructures”, Journal of Cleaner Production, vol. 12(4), pp. 415-428, 2004.
- M. Verotti, P. Masarati, M. Morandini, N.P. Belfiore, “Active isotropic compliance in redundant manipulators”, Multibody System Dynamics, 49 (4), pp. 421-445, 2020