Lo sviluppo di soluzioni robotiche innovative è una delle più importanti aree di ricerca per la sezione MEC, Meccanica e Costruzione delle Macchine.
Nel panorama industriale attuale, la robotica per il manufacturing è diffusa soprattutto negli ambiti in cui è sufficiente eseguire sequenze lineari di operazioni ripetute ciclicamente. Questo paradigma è efficiente soprattutto in caso di prodotti di grande serie, ma non è applicabile in tutti i casi in cui è richiesta flessibilità, diffusa collaborazione con operatori umani e frequente modifica del prodotto e del ciclo produttivo. Lo sviluppo di soluzioni robotiche industriali innovative è volto appunto a soddisfare queste esigenze, espandendo di conseguenza i campi di applicazione.
La robotica di servizio, l’altro grande macrosettore della robotica, è negli ultimi anni in fortissima espansione. Un tema di ricerca fondamentale è lo sviluppo di sistemi di locomozione capaci di coniugare efficienza energetica, velocità su terreni uniformi e compatti, capacità di superamento di ostacoli, gradini e scale, in modo da poter operare in ambienti non strutturati. In particolare le soluzioni ibride, che combinano ruote, zampe e cingoli, permettono di affrontare condizioni operative molto diversificate.
I ricercatori del DIME possiedono una lunga esperienza nello sviluppo di soluzioni robotiche industriali e di robotica mobile.
Nelle figure sono riportati alcuni esempi:
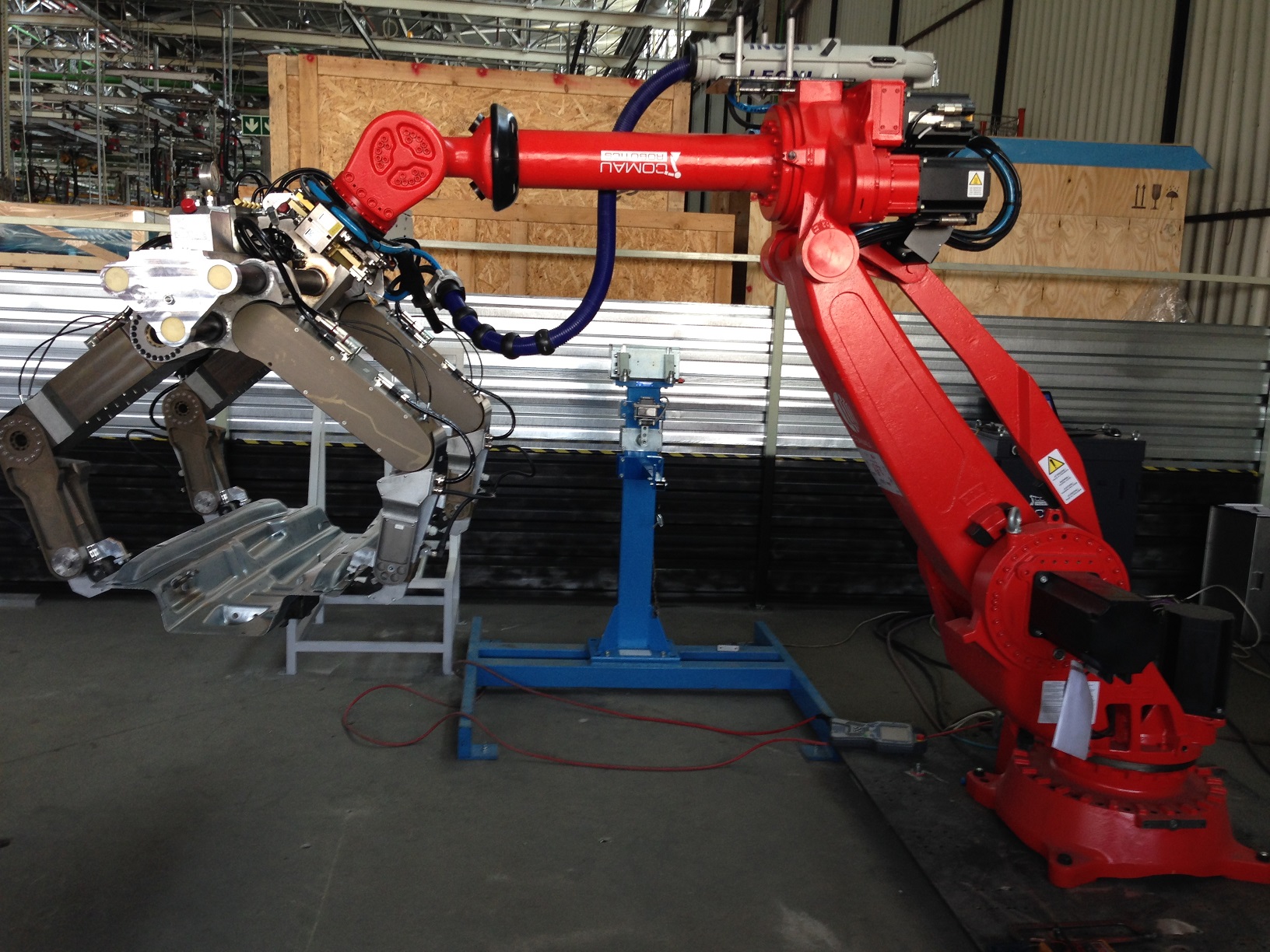
Fig. 1 – Prototipo AUTORECON: AUTOnomus co-operative machines for highly RECONfigurable assembly operations of the future
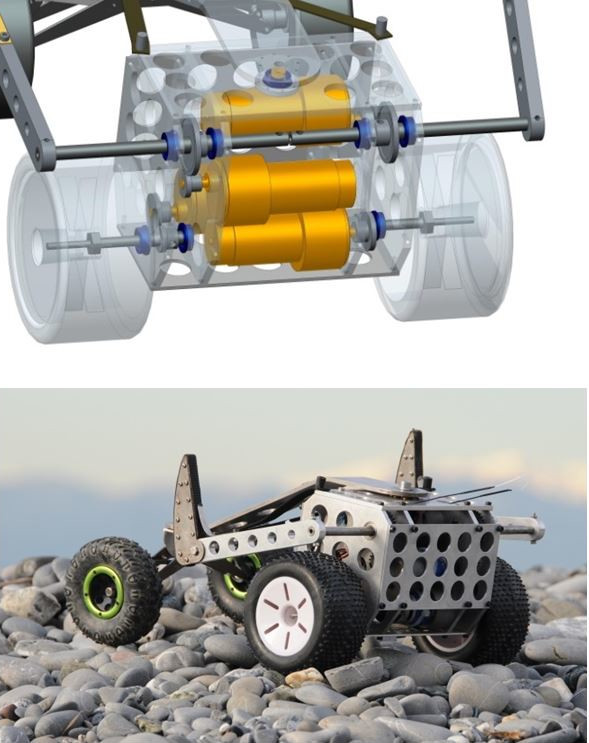
Fig. 2 – Prototipo MANTIS: robot mobile di piccola taglia a locomozione ibrida a ruote e zampe per la sorveglianza e l’ispezione in ambenti non strutturati
Fig. 3 – Prototipo ROBOCLIMBER: robot arrampicatore a zampe e funi per il consolidamento di pareti rocciose
Ricercatori
- Pietro Fanghella
- Matteo Zoppi
- Luca Bruzzone
Laboratori
- Mechanical Computer Aided Engineering (MCAELab)
- Progettazione Meccanica per l’Automazione e la Robotica (PMARLab)
Pubblicazioni
- Keerthi Sagara, Luis De Leonardo, Rezia Molfino, Teresa Zielinska, Cezary, Zielinskic, Dimiter Zlatanov, Matteo Zoppi, The SwarmItFix Pilot, Procedia Manufacturing, 11, 413-422, 2017.
- Shengnan Lu, Zeshan Ahmad, Matteo Zoppi, Xilun Ding, Dimiter Zlatanov, Rezia Molfino, Design and Testing of a Highly Reconfigurable Fixture With Lockable Robotic Arms, ASME Journal of Mechanical Design, 138(8):085001, 2016.
- Matteo Zoppi, Rezia Molfino, Equilibrium analysis of multi-limbs walking and climbing robots, Autonomous Robots 21(3), 199-210, 2006.
- Luca Bruzzone, Pietro Fanghella, Giuseppe Quaglia, Experimental performance assessment of mantis 2, hybrid leg-wheel mobile robot, International Journal of Automation Technology, 11(3), 396-403, 2017.
- Giuseppe Quaglia, Luca Bruzzone, Giorgio Bozzini, Riccardo Oderio, Roberto Razzoli, Epi.q-TG: mobile robot for surveillance, Industrial Robot, 38(3), 282-291, 2011.